Main publication
- Matthias Mueller, Vincent Casser, Jean Lahoud, Neil Smith and Bernard Ghanem: “Sim4CV: A Photo-Realistic Simulator for Computer Vision.” International Journal of Computer Vision (IJCV), 2018. (full text)
Related publications
- Vincent Casser and Matthias Mueller, Neil Smith, Dominik Michels and Bernard Ghanem: “Teaching UAVs to Race: End-to-End Regression of Agile Controls in Simulation.” 2nd International Workshop on Computer Vision for UAVs, ECCV’18, 2018. Best paper award. (full text)
- Matthias Mueller, Guohao Li, Vincent Casser, Neil Smith, Dominik Michels, Bernard Ghanem: “Learning a Controller Fusion Network by Online Trajectory Filtering for Vision-based UAV Racing.” 3rd International Workshop on Computer Vision for UAVs, CVPR’19. (full text)
![]()
Abstract
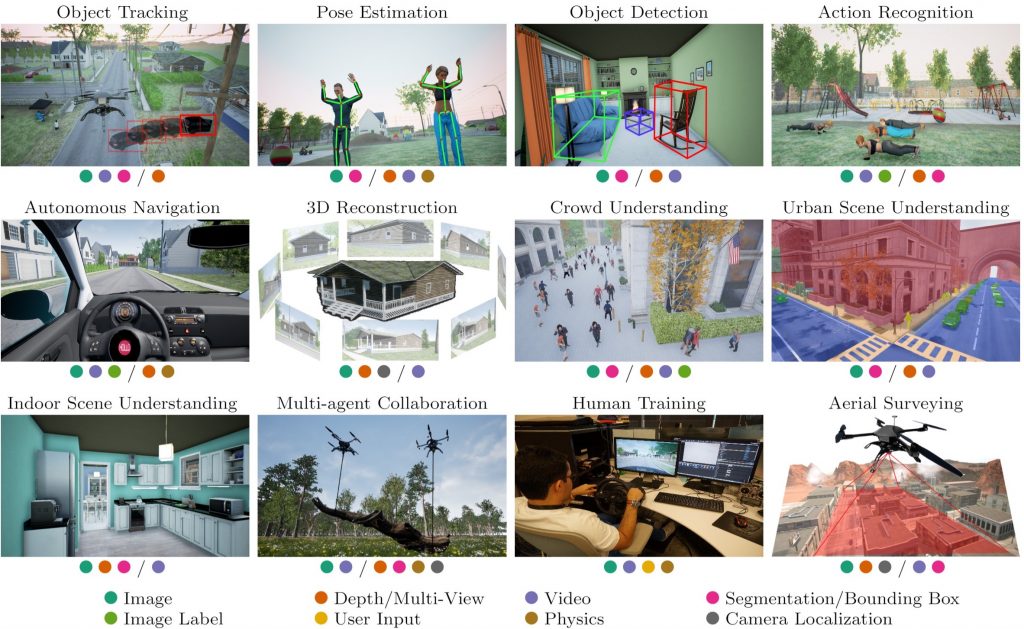
We present a photo-realistic training and evaluation simulator (Sim4CV) with extensive applications across various fields of computer vision. Built on top of the Unreal Engine, the simulator integrates full featured physics based cars, unmanned aerial vehicles (UAVs), and animated human actors in diverse urban and suburban 3D environments. The simulator fully integrates both several state-of-the-art tracking algorithms with a benchmark evaluation tool and a generic deep neural network (DNN) interface for real-time evaluation. It generates synthetic photo-realistic datasets with automatic groundtruth annotations to easily extend existing real-world datasets and provides extensive synthetic data variety through its ability to reconfigure synthetic worlds on the fly using an automatic world generation tool.
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Example applications Urban Scene Understanding Pose Estimation Multi Agent Collaboration Indoor Scene Understanding Crowd Understanding Aerial Surveying Autonomous Navigation Human Training Action Recognition 3D Reconstruction Object Tracking

Urban Scene Understanding

Pose Estimation

Multi Agent Collaboration

Indoor Scene Understanding

Crowd Understanding

Aerial Surveying

Autonomous Navigation

Human Training

Action Recognition

3D Reconstruction
![]()
Object Tracking
Supplementary material
Video showcasing autonomous driving and UAV tracking within Sim4CV.
Availability
Sim4CV is open-source and can be downloaded below. We invite anyone interested to contribute to its future development!